Image courtesy of Osaka University.
Researchers at Osaka University, Japan, have used experimental data and Bayesian inference to study the control of leg motion during walking, and find that intervention occurs only when discoordination exceeds a certain threshold, which may improve rehabilitation methods.
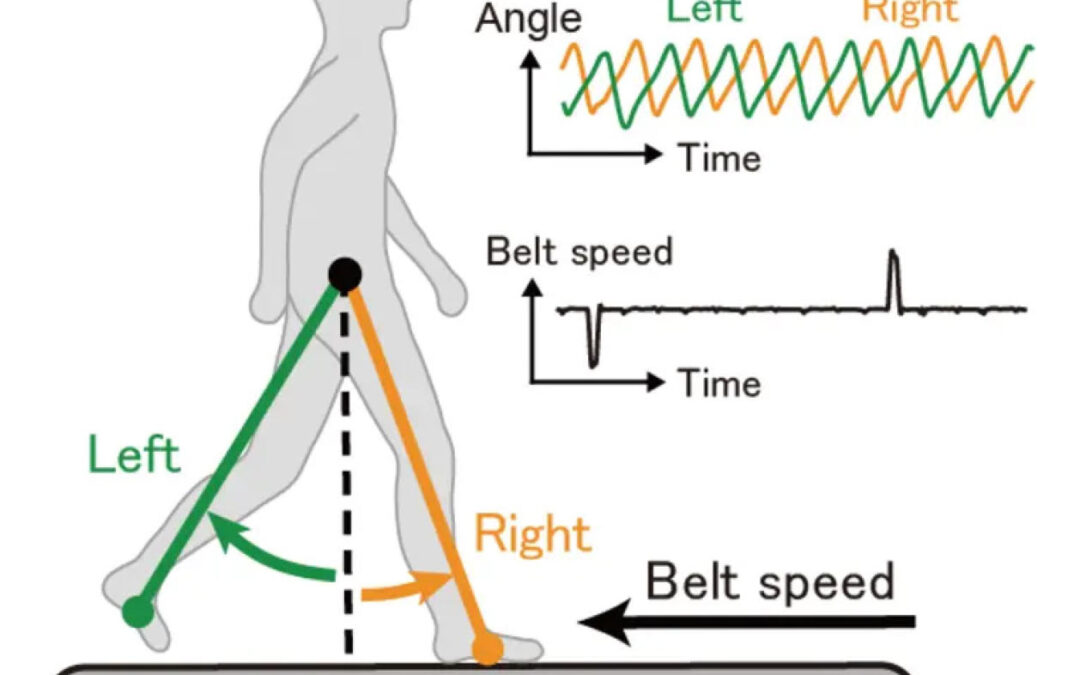
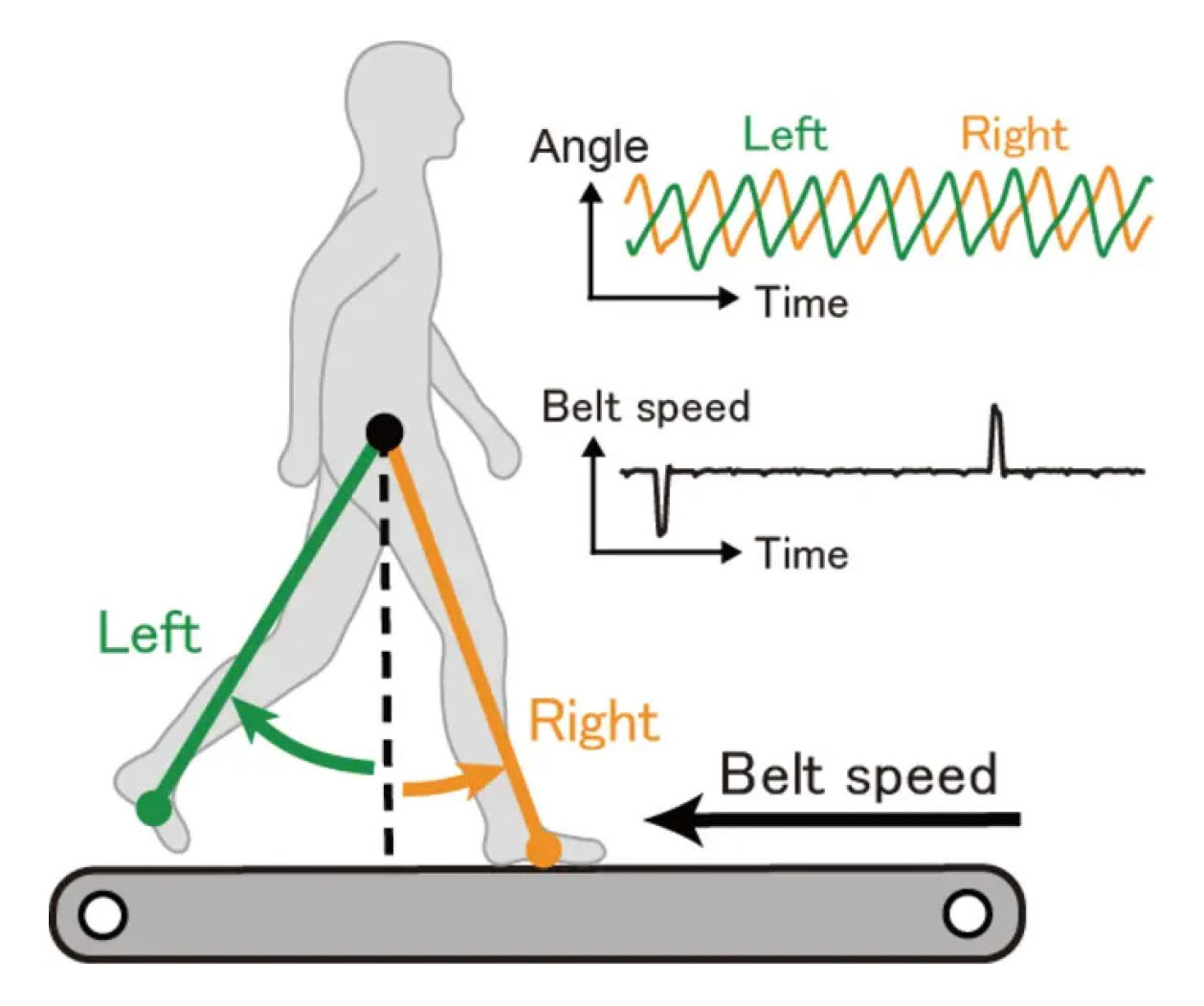
For the study, the researchers captured kinematic data from healthy patients walking on a treadmill that was occasionally perturbed by a sudden change in speed. This led to a momentary loss of the antiphase relationship, but it was quickly restored as the subjects reoriented their walking movements. The data from this experiment was analyzed using a mathematical model of 2 coupled oscillators—similar to 2 pendulums connected by a spring—along with a Bayesian inference method. The approach allowed the researchers to calculate the most probable function that represents how the brain applied its control to coordinate the leg motions.
To simplify the problem further, phase reduction theory was applied, which assumes that the perturbed system is returning to a regular periodic solution, called the limit cycle. Surprisingly, the researchers found that the brain does not actively intervene to coordinate the relative position of the legs until they are a certain amount out of lockstep. They suggest that not requiring the constant application of control improves both energy efficiency and maneuverability.
This research may be important to help improve the walking of elderly people, or individuals who have experienced the neurological effects of a stroke or Parkinson’s disease. It may also lead to the development of physical aids that help people walk more naturally.





