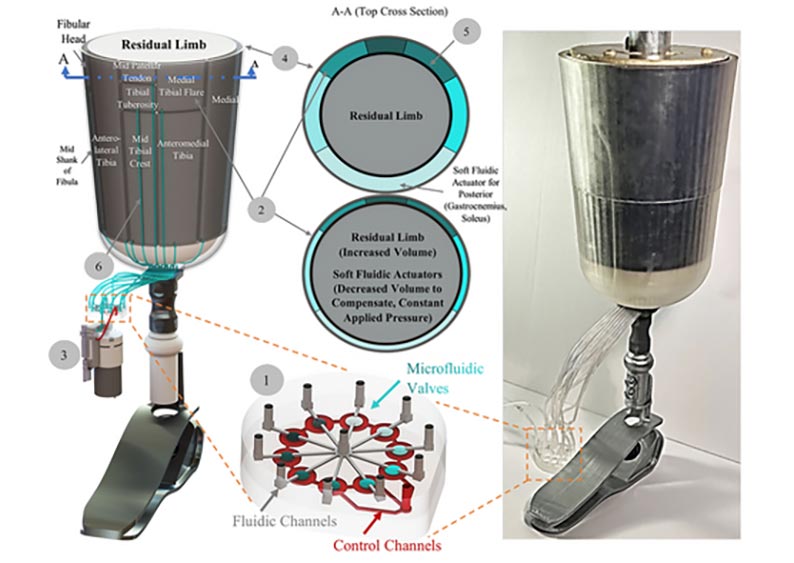
Proof-of-concept rendering (left) and photo (right) of the prototype of the new microfluidics-enabled soft robotic prosthesis for lower limb amputees. Image courtesy of Waterloo Microfluidics Laboratory at University of Waterloo.
Canadian scientists have developed a new type of prosthesis using microfluidics-enabled soft robotics, which promises to greatly reduce skin ulcerations and pain in patients who have had a transtibial amputation.
The scientists started with a recently developed device using pneumatic actuators to adjust the pressure of the prosthetic socket. They also developed a way to miniaturize the actuators by designing a microfluidic chip with 10 integrated pneumatic valves to control each actuator. The full system is controlled by a miniature air pump and 2 solenoid valves that provide air to the microfluidic chip. The control box is small and light enough to be worn as part of the prosthesis.
“Rather than creating a new type of prosthetic socket, the typical silicon/fabric limb liner is replaced with a single layer of liner with integrated soft fluidic actuators as an interfacing layer,” said Carolyn Ren, PhD, from the University of Waterloo, Ontario, Canada, who was part of the team that developed the device.
Medical personnel with extensive experience in prosthetic devices were part of the team and provided a detailed map of desired pressures for the prosthetic socket. The group carried out extensive measurements of the contact pressure provided by each actuator and compared these to the desired pressure for a working prosthesis. All 10 actuators were found to produce pressures in the desired range, suggesting the device will work well in the field. Future research will test the approach on a more accurate biological model. The group plans additional research to integrate pressure sensors directly into the prosthetic liner.