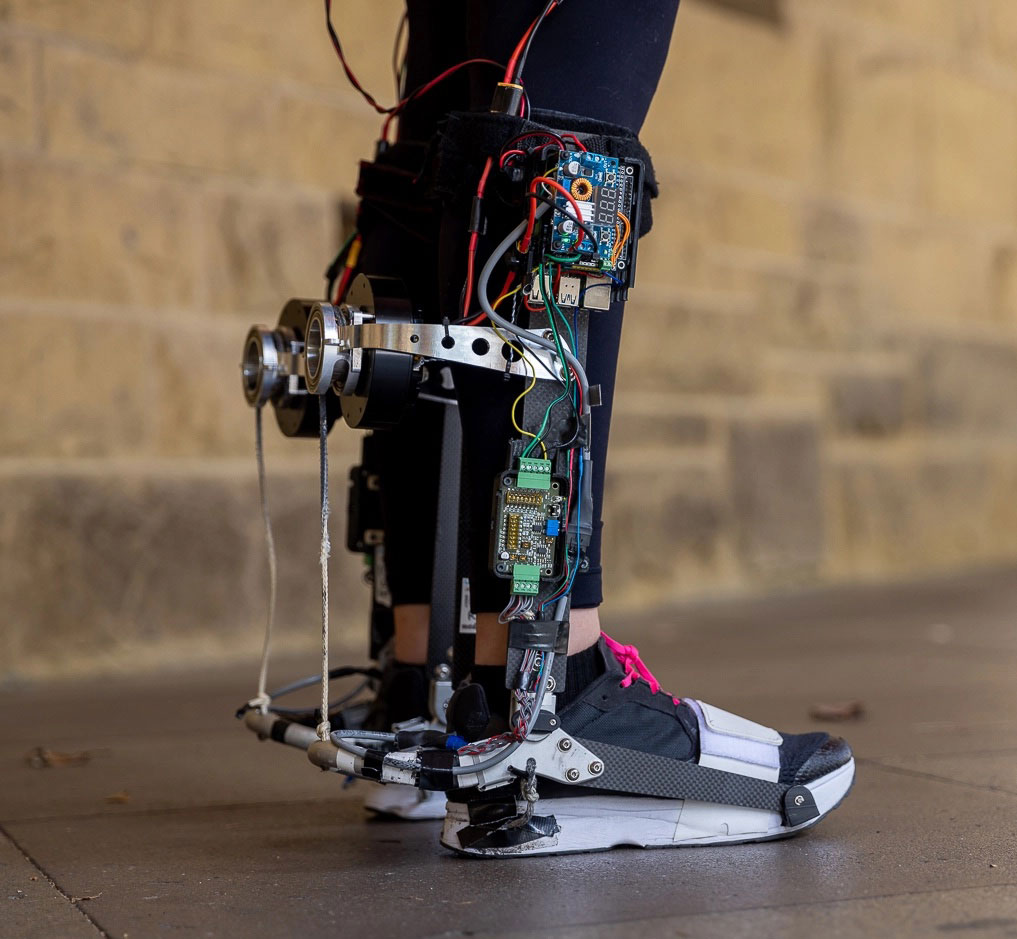
A close-up of the untethered exoskeleton, which monitors movement using inexpensive sensors. Image courtesy of Kurt Hickman.
Stanford University researchers have developed a boot-like exoskeleton that can assist with walking out in the “wild.” It uses machine-based learning to adapt to a wearer’s gait. The aim is to help people with mobility impairments, particularly older people, move throughout the world as they like.
The major barrier for an effective exoskeleton in the past was individualization. To address that problem, the researchers collected motion and energy expenditure data from students and volunteers hooked up to an exoskeleton emulator to understand how the way a person walks with the exoskeleton relates to how much energy they are using. These data revealed the benefits of different kinds of assistance offered by the emulator and informed a machine-learning model that the real-world exoskeleton now uses to adapt to each wearer. The untethered exoskeleton monitors movement using only inexpensive wearable sensors integrated into the boot.
The exoskeleton makes walking easier and can increase speed by applying torque at the ankle, replacing some of the function of the calf muscle. When a person is first using the exoskeleton, it provides a slightly different pattern of assistance each time the person walks. By measuring the resulting motion, the machine-learning model determines how to better assist the person the next time they walk. It takes about 1 hour of walking for the exoskeleton to customize to a new user. In tests, the researchers found their exoskeleton exceeded their expectations. According to their calculations, the energy savings and speed boost were equivalent to “taking off a 30-pound backpack.”





