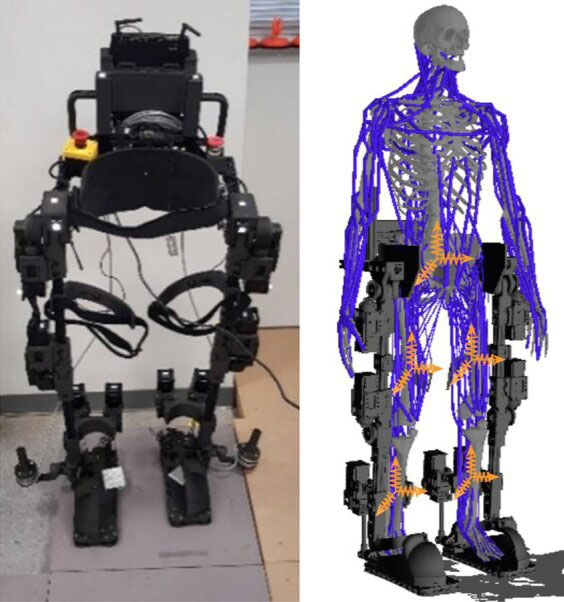
(Left) The developed prototype of the lower extremity robotic exoskeleton (LE-RE). (Right) The integrated musculoskeletal and exoskeleton model. The yellow coordination frames show the bushing frames coincidentally fixed on the LE-RE and the human.
A team of researchers from the New Jersey Institute of Technology (NJIT), North Carolina State University, and University of North Carolina at Chapel Hill have developed a new method for controlling lower limb exoskeletons. The novel method developed by the research team uses deep reinforcement learning to improve exoskeleton control. Reinforcement learning is a type of artificial intelligence (AI) that enables machines to learn from their own experiences through trial and error. The method enables more robust and natural walking control for users of lower limb exoskeletons.
“Using a musculoskeletal model coupled with an exoskeleton, we simulated the movements of the lower limb and trained the exoskeleton control system to achieve natural walking patterns using reinforcement learning,” explained research team member Xianlian Zhou, PhD, associate professor and director of the BioDynamics Lab in the Department of Biomedical Engineering at NJIT. “We are testing the system in real-world conditions with a lower limb exoskeleton being developed by our team and the results show the potential for improved walking stability and reduced user fatigue.”
The team determined that their proposed model generated a universal robust walking controller capable of handling various levels of human-exoskeleton interactions without the need for tuning parameters. The new system has the potential to benefit a wide range of users, including those with spinal cord injuries, multiple sclerosis, stroke, and other neurological conditions. The researchers plan to continue testing the system with users and further refine the control algorithms to improve walking performance.