Image courtesy of Fuyang Yu, School of Artificial Intelligence, University of Chinese Academy of Sciences.
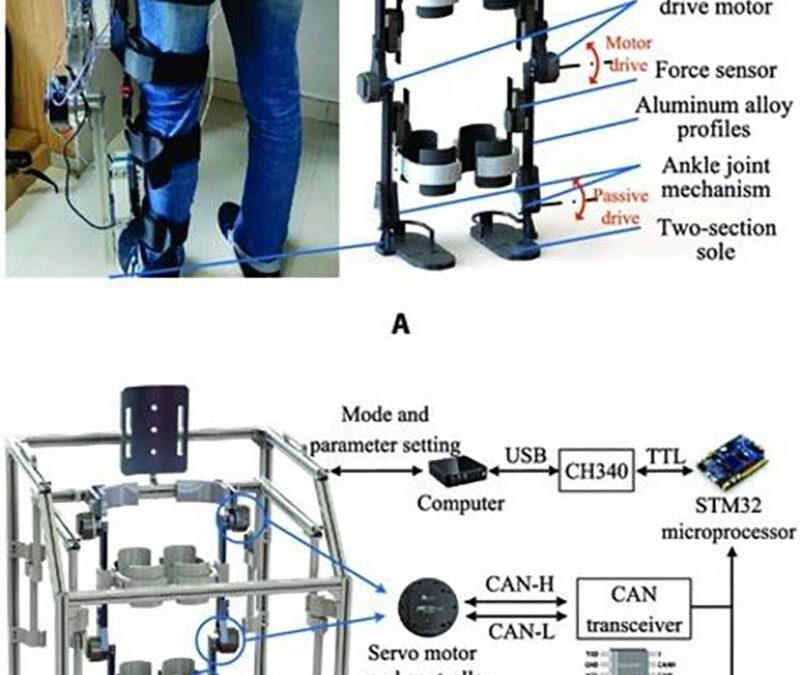
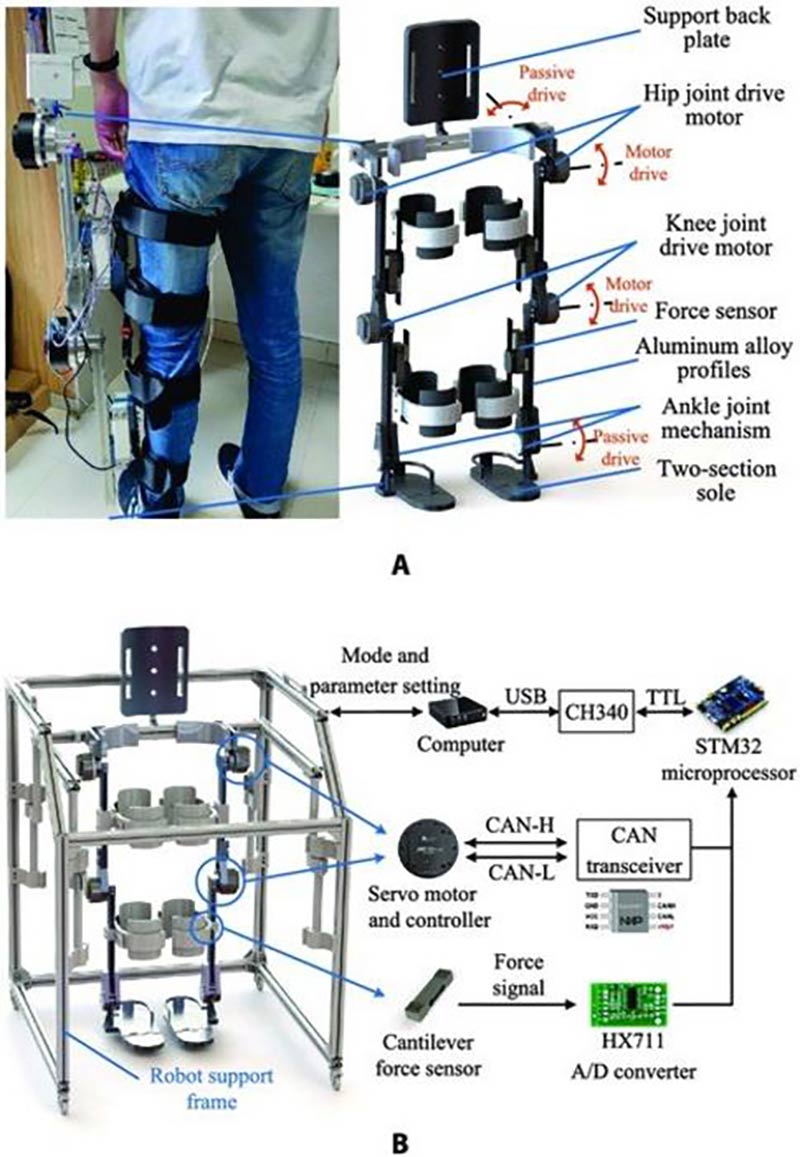
A gait training robot, developed through collaborative efforts from institutions including the University of Chinese Academy of Sciences and the Institute of Automation at the Chinese Academy of Sciences, is designed to significantly improve the safety and effectiveness of gait training through a novel method based on human-robot interaction force measurement: The robot dynamically adjusts its gait in real-time to match the user’s intent and capabilities, a significant shift from the more common, passive training approaches.
The innovation features an array of sensors and a sophisticated control system. These components work together to measure the forces exerted by a patient’s movements and adjust accordingly, ensuring that the robot’s support is neither too little nor too excessive. The core innovation lies in its adaptive gait training capability. By using face-to-face mounted cantilever beam force sensors, the robot can accurately detect and interpret the subtle forces exerted by the patient during a training session. This data informs a dynamic model that predicts and adapts the robot’s movements in real-time, significantly enhancing the training’s responsiveness and effectiveness.
Results from interactive experiments demonstrated that the robot could significantly improve the training experience by responding to the patient’s muscle inputs. This adaptability not only maximizes engagement but also helps to prevent muscle atrophy and improves overall recovery outcomes. Moreover, this robot represents a promising solution for remote or underserved areas where professional medical and rehabilitation support may be scarce. Its ability to offer personalized training remotely could democratize access to high-quality rehabilitation services, making it a valuable tool in global health contexts.





