By NFJ Waterval, MSC; MM van der Krogt, Dr; K Veerkamp, T Geijtenbeek, PhD; J Harlaar, Dr, IR; F Nollet, MD, PhD; and MA Brehm, PhD
By NFJ Waterval, MSC; MM van der Krogt, Dr; K Veerkamp, T Geijtenbeek, PhD; J Harlaar, Dr, IR; F Nollet, MD, PhD; and MA Brehm, PhD
To maximize the AFO’s effect on walking energy cost reduction, the AFO’s bending stiffness needs to be individually optimized.
The stiffness of a dorsal leaf ankle foot orthosis (AFO) that minimizes walking energy cost in people with plantarflexor weakness varies between individuals. Using predictive simulations, the authors of this article studied the effects of plantarflexor weakness, passive plantarflexor stiffness, body mass, and walking speed on the optimal AFO stiffness for energy cost reduction.
Methods
The study authors employed a planar, 9-degrees-of-freedom musculoskeletal model, in which for validation maximal strength of the plantarflexors was reduced by 80%. Walking simulations, driven by minimizing a comprehensive cost function of which energy cost was the main contributor, were generated using a reflex-based controller. Simulations of walking without and with an AFO with stiffnesses between 0.9 and 8.7 Nm/degree were generated. After validation against experimental data of 11 people with plantarflexor weakness using the Root-mean-square error (RMSE), the study authors systematically changed plantarflexor weakness (range: 40–90% weakness), passive plantarflexor stiffness (range: 20–200% of normal), body mass (+ 30%), and walking speed (range: 0.8–1.2 m/s) in their baseline model to evaluate their effect on the optimal AFO stiffness for energy cost minimization.
Results
The simulations had an RMSE < 2 for all lower limb joint kinetics and kinematics except the knee and hip power for walking without an AFO. When systematically varying model parameters, more severe plantarflexor weakness, lower passive plantarflexor stiffness, higher body mass, and walking speed increased the optimal AFO stiffness for energy cost minimization, with the largest effects for severity of plantarflexor weakness.
Discussion
The study authors showed a strong and interactive effect of severity of plantarflexor weakness and speed on the optimal AFO stiffness for walking energy cost reduction. Body mass and passive plantarflexor stiffness influenced the optimal stiffness to a less extent. Further, the optimal AFO stiffness for energy cost minimization was higher compared to the stiffnesses best normalizing specific gait parameters.
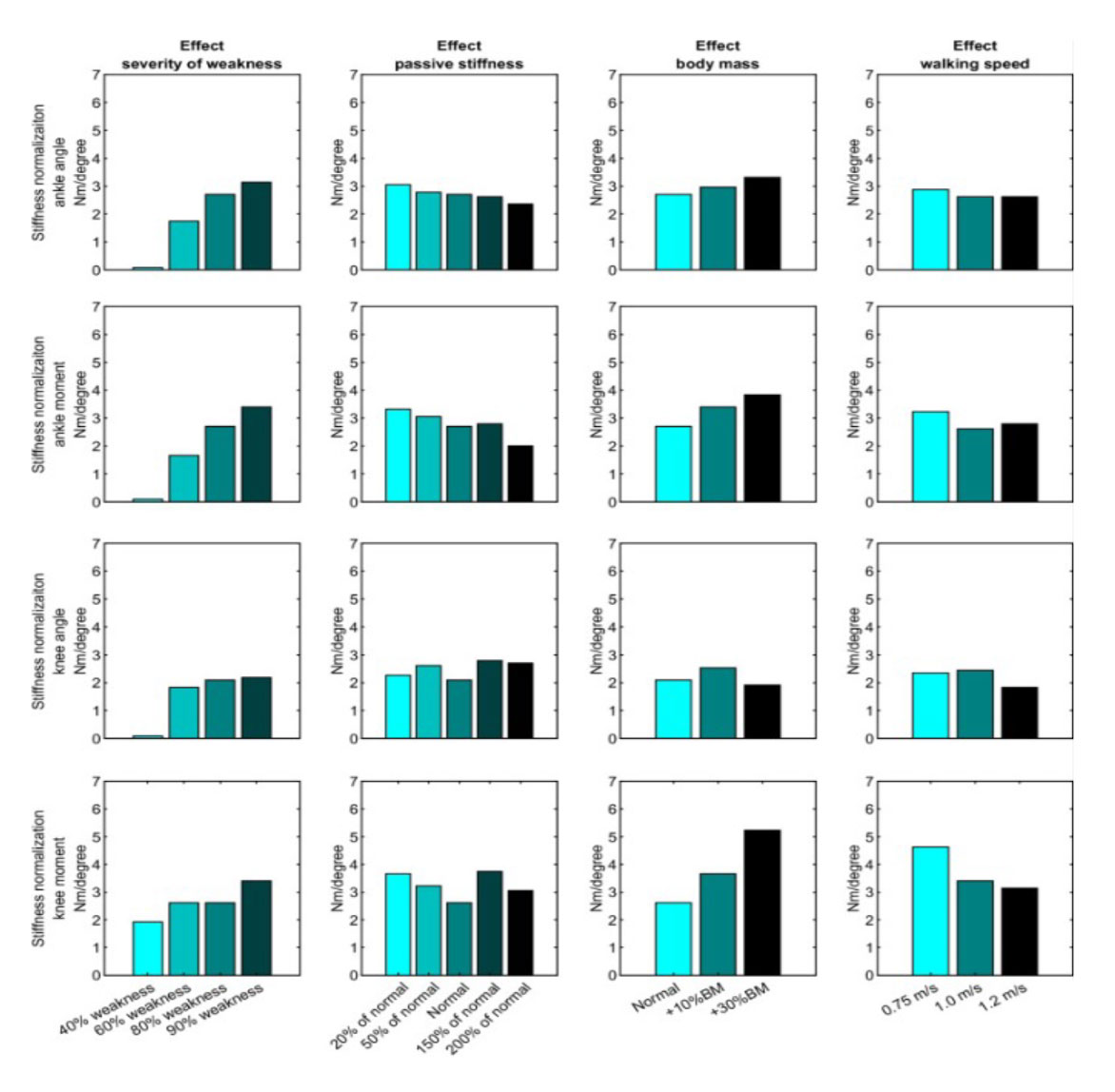
Figure 1. Effects of muscle pathophysiology, body mass, and walking speed on the minimum AFO stiffness necessary to normalize the ankle angle, ankle moment, knee angle and knee moment.i
The simulations of walking without the AFO overestimated the effect of plantarflexor weakness regarding the maximal ankle dorsiflexion and external knee moment compared to experimental data, and were not as well predicted as with the AFO. This causes concern regarding the validity of walking energy cost and hence the effect sizes found by the different AFO stiffness levels. Further, the simulations without AFO demonstrated more dorsiflexion during stance and no foot drop during swing, compared to the experimental data. The exaggerated dorsiflexion might be due to an underestimation of the passive ankle stiffness, as this was kept the same compared to the healthy model. The absence of a foot drop in the simulations is due to the fact that the study authors did not model dorsiflexor weakness to reduce the complexity of the simulations, while such weakness was present in the experimental population.
The study authors modeled the AFO as a massless rotational spring around the ankle, which has been proven valid in inverse dynamic simulations, but neglects the effects of AFO mass and of footplate stiffness on gait. They now demonstrated that such models are capable of predicting the effects of the AFO on lower leg kinematics and kinetics, although prediction of the ankle and hip power matched less well with experimental data. The simulations predicted a slight reduction in ankle power with an AFO instead of a slight increase. This may be explained by the lower predicted increase in walking speed with AFO in the simulations compared to the experimental data, and ankle power and AFO loading depend on walking speed.
Despite the discrepancies between the simulations and experimental data, in general the simulations did capture most important gait deviations caused by plantarflexor and effects of the AFO that influence walking energy cost. For most models, the optimal AFO stiffness reduces the walking energy cost with 0.8–1.2 J/kg/m compared to the no AFO simulations, which is similar to the effect of AFOs with an optimized stiffness found experimentally. This provides confidence that these simulations indeed provide an indication of the potential benefit of AFOs.
The simulations with different musculoskeletal models revealed that mainly severity of weakness, body mass, and walking speed explained the experimentally found variety in individual optimal AFO stiffness in individuals with plantarflexor weakness. In most cases, the optimal stiffness for energy cost minimization was between 3 and 5 Nm/degree with outliers as high as 7 Nm/degree for heavy models walking fast. That more severe weakness resulted in a higher optimal stiffness is in correspondence with data indicating that more affected patients put a larger strain on the AFO, and this larger strain likely also explains why walking faster results in a higher optimal stiffness. The fact that these inverted-pendulum simulations neglected the effect of speed on knee flexion in the loading response, and the corresponding higher plantarflexor activation in early stance, may be a reason for the discrepancy in results.
In case of plantarflexor weakness, the higher plantarflexor activation in the loading response is compensated for by the AFO, and hence more assistance is needed at higher speeds to minimize energy cost. Additionally, in this study, an interaction between the different factors studied seems to exist, as for example no effect of body mass on optimal stiffness was found when a higher, fixed walking speed was enforced. Without enforcing a higher walking speed, an increase in body mass resulted in a lower speed, which is more economic for obese people, which in turn reduced the optimal stiffness. Also, for passive stiffness an interaction with walking speed existed, as the effects of passive stiffness reduced when enforcing a faster speed. Contrary to the other models, for the model with 90% weakness the optimal stiffness increased at an enforced faster speed of 1.2 m/s. In this particular model, at low stiffness levels an external knee extension moment in the loading response was predicted, which may be favorable for energy cost, but will cause joint pain in humans. Additionally, the plantarflexors may be too weak to maintain a normal walking pattern at these faster speeds. Clinically, patients with severe bilateral plantarflexor weakness have a slower self-selected walking speed even with optimized AFOs.
All models using optimal AFO stiffness walked with a relatively similar ankle moment and knee moment. The stiffness necessary to normalize joint angles required less stiff AFOs compared to normalization of the joint moments or energy cost, especially for the knee (Fig. 1). Normalization of the knee moment might be more directly related with quadriceps activation, and hence energy cost, than knee angle. Additionally, to increase walking speed an increase in ankle moment is necessary, which apparently requires a higher stiffness compared to normalization of the ankle angle. However, the optimal AFO stiffness for energy cost minimization was consistently higher compared to the stiffness best normalizing both joint moments and angles, indicating that other factors also influence energy cost. Potentially, higher stiffness levels reduce energy cost further by taking over work of the plantarflexor muscles or by generating an external knee extension moment earlier in the gait cycle.
Conclusions
The forward simulations demonstrate that in individuals with bilateral plantarflexor weakness, the necessary AFO stiffness for walking energy cost minimization is largely affected by severity of plantarflexor weakness, while variation in walking speed, passive muscle stiffness, and body mass influence the optimal stiffness to a lesser extent. That gait deviations without an AFO are overestimated may have exaggerated the required support of the AFO to minimize walking energy cost. Future research should focus on improving predictive simulations in order to implement personalized predictions in usual care.
Nicolaas Waterval, MSC, Other Academic Staff, Amsterdam Movement Science (AMS) – Rehabilitation & Development, Other Academic Staff, Rehabilitation medicine, Amsterdam University Medical Centers (UMC).
Marjolein van der Krogt, Dr, (Principal Investigator), Research Associate, AMS – Rehabilitation & Development (VUmc), Associate Professor, Rehabilitation medicine (VUmc).
Kirsten Veerkamp, Research Associate, Faculty of Behavioural and Movement Sciences, Cognitive Psychology, Research Associate, IBBA, Amsterdam UMC, Vrije Universiteit Amsterdam.
Thomas Geijtenbeek, PhD, Delft University of Technology | TU · Department of Biomechanical Engineering.
J. (Jaap) Harlaar, Prof. dr. ir., Mechanical, Maritime and Materials Engineering, Biomechatronics & Human-Machine Control, Delft University of Technology.
Frans Nollet, Prof. MD PhD, Full Professor, AMS – Rehabilitation & Development, EURO-NMD, Full Professor, Rehabilitation medicine, Amsterdam UMC.

Merel-Anne Brehm, PhD, Rehabilitation Medicine, Amsterdam UMC Academic Medical Center.
This article has been excerpted from “The interaction between muscle pathophysiology, body mass, walking speed and ankle foot orthosis stiffness on walking energy cost: a predictive simulation study.” J NeuroEngineering Rehabil 20, 117 (2023). https://doi.org/10.1186/s12984-023-01239-z. Editing has occurred, including the renumbering or removal of tables, and references have been removed for brevity. Use is per CC Attribution 4.0 International License.